Software Architecture¶
Task Diagram¶
The robot runs nine concurrent tasks under a cooperative round-robin scheduler
(cotask). Tasks communicate exclusively through
shared variables and queues (task_share),
with no direct function calls between tasks.
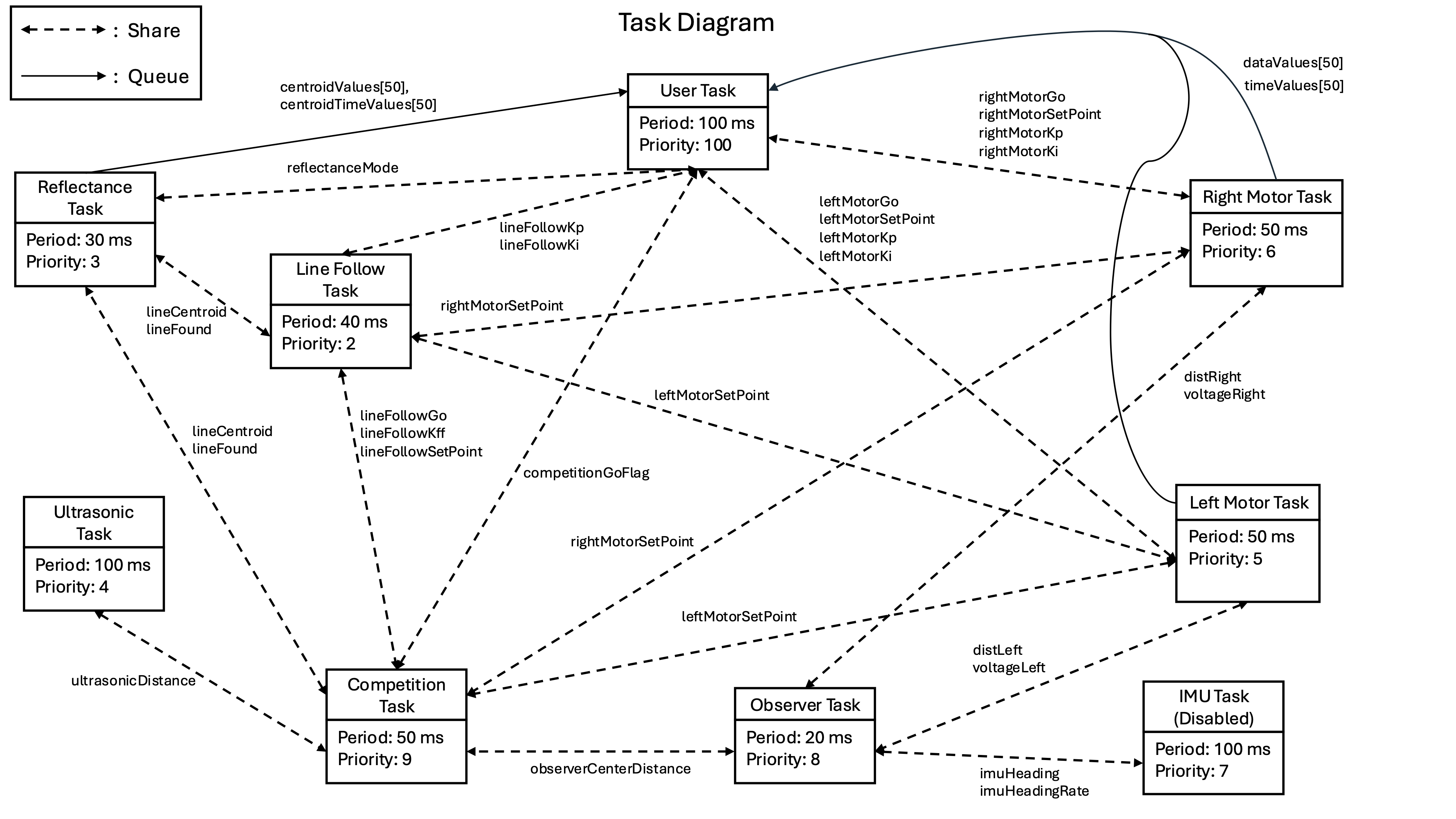
Task Summary¶
Task |
Period |
Priority |
Role |
|---|---|---|---|
|
100 ms |
100 |
Serial UI, command dispatch |
|
50 ms |
5 |
PI velocity control, left wheel |
|
50 ms |
6 |
PI velocity control, right wheel |
|
30 ms |
3 |
Line sensor calibration & centroid |
|
40 ms |
2 |
Steering PI + feed-forward |
|
100 ms |
7 |
Heading & heading-rate (disabled at competition) |
|
100 ms |
4 |
Distance measurement |
|
20 ms |
8 |
Center distance estimate |
|
50 ms |
9 |
Course sequencer (15-state FSM) |
Control Scheme¶
Motor Velocity Control¶
The discrete-time PI controller (implemented in controller.py) computes:
with conditional anti-windup: the integrator is held constant whenever the output is saturated and further integration would deepen the saturation. Output is clamped to ±100% duty cycle.
Tuned gains:
Parameter |
Value |
|---|---|
\(K_p\) |
0.15 |
\(K_i\) |
4.0 |
Saturation |
±100 % duty cycle |
Line-Following Controller¶
The line-following controller steers the robot by applying a differential speed correction proportional to the centroid error:
where \(u_{LF}\) is the PI controller output driven by the reflectance centroid (range −1 to +1, where 0 = centered on line). The actuator gain scales the correction to mm/s using the effective wheel-to-wheel width of 141 mm.
A feed-forward term assists with curved track segments:
Tuned gains:
Parameter |
Value |
Notes |
|---|---|---|
\(K_p\) |
0.40 |
Steering proportional gain |
\(K_i\) |
0.30 |
Integral anti-drift |
\(K_{ff}\) (straight) |
0.0 |
No feed-forward on straights |
\(K_{ff}\) (tight curve, R125) |
0.6 |
Aggressive assist |
\(K_{ff}\) (gentle curve) |
0.3 |
Moderate assist |
Saturation |
±100 mm/s correction |
State Observer¶
A discrete-time Luenberger observer was designed offline for the robot’s linearized model. The state vector is:
with the update equations:
The observer task runs at 20 ms to match the model’s discretization period. In competition, the full observer was replaced with a simple wheel-average estimator for reliability:
Algorithms & Design Decisions¶
Cooperative Multitasking¶
Each task is a Python generator function that calls yield at least once per iteration, returning control to the cotask scheduler. The scheduler runs each task at its configured period using priority-based round-robin scheduling. Inter-task data is exchanged through 41 Share objects (single-value, interrupt-safe) and 4 50-element Queue buffers for time-series logging. Configuration (PI gains, IMU calibration offsets) is persisted to gains.json and imu.json on the MCU filesystem so settings survive power cycles.
Reflectance Centroid Calculation¶
Each of the 7 IR sensors is first normalized using a two-point calibration:
where \(r_i\) is the averaged raw ADC reading (averaged over 5 reads per cycle to reduce noise), and \(r_{dark,i}\), \(r_{light,i}\) are per-sensor dark and light reference values captured during calibration. The result is 0 for a white surface and 1 for the black line.
The line position is then computed as a weighted centroid:
\(C\) ranges from −3 (line at far left) to +3 (line at far right), with 0 meaning centered. For the line-following controller the output is divided by 3 to normalize to [−1, +1].
Line-loss detection uses the sum of calibrated values \(S = \sum v_i\). If \(S < 1.0\) (all sensors read white — line not found) or \(S > 6.85\) (all sensors read black — sensor off track), the line is considered lost and the last valid centroid is returned instead.
Calibration the robot is placed on a light surface, then a dark surface, and each phase collects 100 samples at 10 ms intervals. Per-sensor averages are stored to ir_calibration.json on the MCU filesystem and reloaded on startup.