Home¶
Authors: Max Schecter & Gabe Haarberg
Course: ME 405 — Mechatronics, Cal Poly SLO
Platform: Pololu Romi chassis · STM32 Nucleo · MicroPython
Overview¶
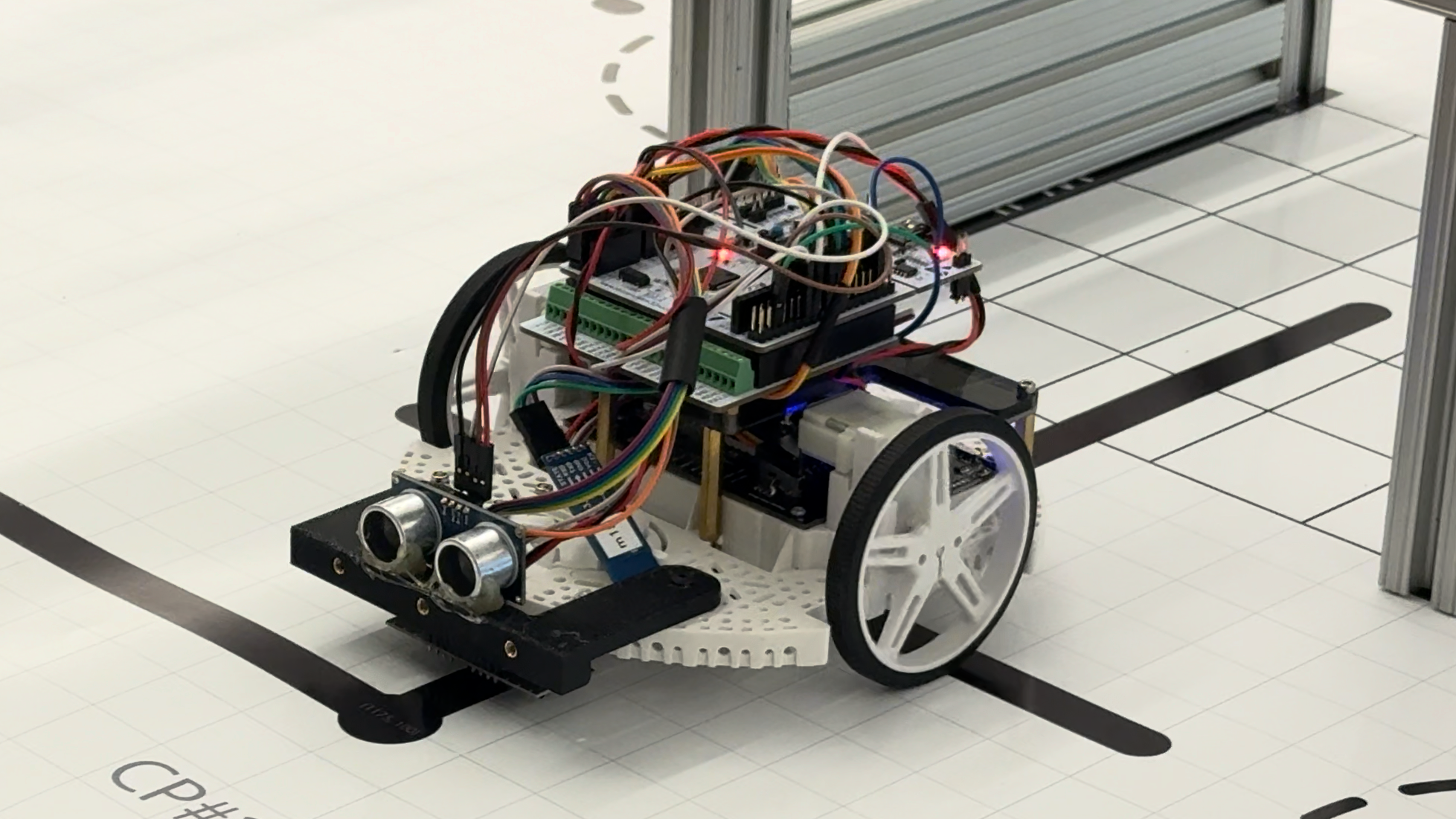
Romi is an autonomous line-following robot built on the Pololu Romi chassis. It was built for a competition in the Cal Poly ME 405 class. It uses a 7-element IR reflectance array, a BNO055 IMU, quadrature encoders, and a model-based state observer to navigate a competition course reliably and at speed.
Robot Photo¶
Video Demonstration¶
Key Features¶
7-element IR reflectance array (Pololu QTRX) for line sensing and weighted-centroid calculation
BNO055 9-DOF IMU for heading and heading-rate feedback over I2C
Quadrature encoders on both wheels (1437.12 counts/rev, 35 mm wheel radius) for odometry and velocity feedback
PI velocity controllers on each motor (Kp = 0.15, Ki = 4.0) with conditional anti-windup
Proportional + integral + feed-forward line-following controller (Kp = 0.40, Ki = 0.30, Kff = 0–0.6 per segment)
9-task cooperative scheduler (cotask) — tasks communicate via 41 shared variables and 4 data queues
15-state autonomous competition task (task_competition) managing acceleration ramps, arc turns, garage entry, and U-turn sequencing
Discrete-time Luenberger observer designed for the linearized model (wheel-average fallback used in competition for reliability)
Quick Links¶
Hardware Design — sensors, wiring, and mechanical design
Software Architecture — task diagram, control scheme, and algorithms
FSM Documentation — state machine diagrams for every task
Results & Reflection — time trial performance and lessons learned
API Reference — full auto-generated code documentation